Field Trials EurEx-LUNa in Abisko, Sweden 2022
Live-Stream
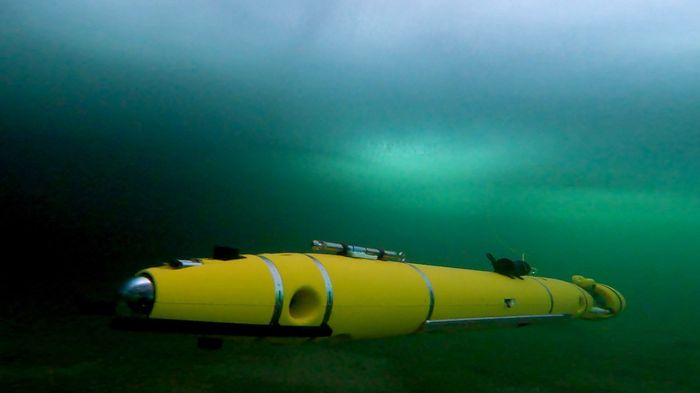
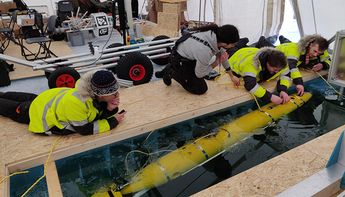
Is there life on Jupiter's moon Europa? An ocean suspected to be under miles of ice gives science hope. But how could it be reached and explored? As part of the German Aerospace Center's (DLR) Explorer Initiatives, the Robotics Innovation Center of the German Research Center of Artificial Intelligence (DFKI) has been investigating this question since 2012 in the Europa Explorer project series. The focus is on the development of robotic systems that can penetrate the water, explore it autonomously and remain there for a longer period of time. At the end of the third phase of the Europa Explorer project for long-range under-ice navigation (EurEx-LUNa) DFKI researchers are now conducting the final field trials in Abisko National Park in northern Sweden. Here they put the autonomous underwater vehicle (AUV) DeepLeng to the test in the frozen Lake Torneträsk to prove the feasibility of the concept for autonomous under-ice navigation. The project EurEx-LUNa is funded by the German Federal Ministry of Economics and Climate Protection (BMWK) via the German Aerospace Center (DLR).
More information: www.dfki.de/en/web/news/eurex-luna-feldtests-schweden
Blog
Back in Bremen
Autonomous underwater docking - check! Elk on the doorstep - check! Northern lights in the sky - check! After two exciting and scientifically very rewarding weeks in Sweden, we arrived safely back in Bremen, Germany. The container also arrived a few days later without any damage to the equipment. Now a lot of data is waiting to be analyzed, but also a lot of photos, videos, and impressions. We are really looking forward to returning to Abisko National Park in a few years to expand our tests on autonomous under-ice navigation, with the very long-term goal of exploring the suspected ocean on Jupiter's moon Europa.
31.3.22







The day started sunny, with -4°C and no wind, thus a perfect day for dissambling our equipment. This went very well and by the evening we now have everything back at the research station, only the cover of the ice hole needs to be picked up tomorrow. This means that we should have everything packed into the container by tomorrow evening, which will give us the opportunity to spend Saturday exploring the region where we have now spent two weeks.
30.3.22



Our last day of experiments started a little warmer, but still -6°C and slightly cloudy with a little wind. First on the agenda was Tom's birthday, which we celebrated with an extensive breakfast with pancakes. After saying goodbye to our media team and Leif (they have already returned to Bremen today), we went down to the lake. We quickly had the AUV prepared and ready for a series of missions testing the vectoring based depth control and waypoin tracking. In this mode, the AUV does not use the dive cell and lateral thrusters for attitude control, but relies solely on the main thruster and its vectoring. After a little tuning, this worked well, and following a quick lunch we continued with longer using this profile. In the late afternoon, a TV crew from Stockholm joined us and did a series of interviews and recordings of our setup for the Swedish Channel 4 news while we continued to work with the AUV. On our last mission, we were able to perform docking with vector-based control, which was a very satisfactory conclusion to our Abisko 2022 trials. We spent about 50 hours with our AUV actively in the water during this time, and the vehicle was submerged for 150 hours (counting also the time it was resting in the water at night). This also ends the livestream, because starting tomorrow we will disassemble all the equipment and start packing, luckily the weather forecast looks calm. In the evening we continued to celebrate both Tom's birthday and the successful completion of our trials.
29.3.22












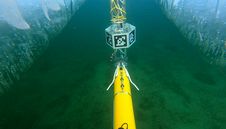
Another cold day with -8°C and light wind started with the transfer of all staff to the tent in the morning. There, with some routine, we deployed the AUV and ROV, which have now been in the lake for a full week. We spent the morning doing another set of 100 x 20 m transects (four consecutive tracks with 5 m swaths) and investigating a slight offset in our course (which turned out to be the effect of the discrepancy between magnetic and geographic north, which is much more pronounced this far north). When we returned to the station for a short lunch, we found that the weather had changed considerably during the morning, with strong, gusty winds and light snowfall. As we got back to the lake, we first opened the top cover of the AUV as a precaution, as the buoyancy of the vehicle had changed and we wanted to check it for leaks, especially in the dive cell. When we found none, we closed the AUV again and added additional buoyancy to compensate. The reason for the deviation was probably the fact that the AUV was underwater for 48 hours, as it normally has the chance to dry out between deployments. This is obviously important to know, as it needs to be taken into account for long-term deployments. While we were testing our solution to the orientation offset, our media team ran a live session on Instagram where researchers tried to answer as many questions as they could while working. The final mission conducted today was a long range transect of 250 m in a northerly direction, getting the AUV out as far as our safety cable would allow. This provided very nice images from the ROV perspective as well as another data set to be post-processed in the future. In the evening we left the AUV back in the lake again and returned to the station, a little later than usual. After another delicious dinner, we planned our last day of AUV testing, as we will spend the last three days of our stay bringing all the equipment back to the station and into our container for the trip home to Bremen on Sunday.
28.3.22



















The day started as the coldest so far with -9°C, but only slightly cloudy and mild wind. After arriving at the tent and activating the heater, we prepared the system for another set of misisons. This time we also collected data with the MBES system and did a series of runs with a maximum distance of 50 m from the ice hole. Unfortunately, the data have some sensor noise artifacts that are probably due to electrical noise from our propulsion system (since they disappeared after we turned it off for testing). After a short lunch break, we were busy fixing some minor problems with the USBL system (a sonar-based system that gives us absolute position measurements relative to the docking station) while four people from the research station staff came to visit and take a look at our setup. We spent the rest of the afternoon trying to optimize some aspects of the docking procedure and figuring out a consistent offset for our heading relative to the ice hole at the end of the missions. After the sunny noon, it quickly became cold as the sun disappeared behind the mountains, so we left the AUV in the lake and headed back to the station. Tomorrow we will try to run longer, 100 x 20 m transects to collect as much data as possible and test the improved docking behavior. In the evening we cooked together and crushed some ice from the lake for cold drinks. Later we were lucky enough to watch the aurora, which was definitely the highlight of our day.
27.3.22





A cold, overcast Sunday with -7°C. Today we decided to take a break for most of the day as the weather was very cold and windy, and we needed some rest after a week of field testing. We spent some more time down at the lake recharging the AUV and copying some collected data to the free space on the hard drive. The vehicle survived the night in the lake well, leading to the decision to make this a permanent solution for the rest of our testing. In the afternoon, the wind gusted to 60+ km/h along with light snowfall and another drop in temperature – in our exposed location on the lake, it became necessary to make some preparations for a stormy night. While part of the team adjusted our multibeam echo sounder (MBES) sonar to the conditions in the lake, the rest built a windbreak for the heater. When the heater ran out of fuel (we can only get new fuel from the research station staff, and they don't work on Sundays), the temperature in the tent dropped rapidly, from 5°C to -1°C in 30 minutes. So at 18:00 we parked the AUV safely in the lake again and drove through the rough weather back to the station. Here we could welcome the additional colleagues from Bremen, Meltem and Annemarie, who will support us with the additional media coverage, as well as Leif, our team leader.
26.3.22




Another cold day with -6°C in the morning, some clouds but no wind at the station. Overnight there were a few centimeters of fresh snow, which made the passage with the vehicle a bit treacherous. When we arrived at the tent, it took us a little extra time to shovel away the snow (which had accumulated around the tent) and set up the heater. Down at the lake the wind was quite strong, so the work was only possible with full protective clothing. After removing the cover from the ice hole (we cover it with OSB boards every night for safety reasons), we had to remove a considerable layer of ice to get to the water. After deploying the AUV and ROV, we spent the time doing preparatory work on the AUV and some exploration with the ROV. We left for a longer lunch today, as we decided to stay late in the evening to do some experiments in the dark. When we returned from lunch, we began with longer missions starting at the surface and returning to the dock at the end. The longest run was about 100 m from the docking station, in complete darkness, which worked perfectly. Since we felt it was too dangerous to take the AUV out in the dark, we left it in the water (though securely attached to the crane) where it would be protected from the freezing temperatures. Tomorrow we will not go in the water in the morning but charge the AUV and copy the collected data (we usually do this in the evening) and only do a series of longer missions again in the afternoon.
25.3.22







With -5°C and overcast sky, the day started colder than previous days. After bringing all the equipment to the lake, our first task was to install and activate the heater for our tent – a diesel-powered hot air device. This quickly warmed the tent to a comfortable working temperature of 5 to 10°C. Especially in the afternoon, when the wind rose and it began to snow, this was invaluable and will be used in the next days as temperatures drop. In the now warm tent, we made some minor modifications to the docking station, mainly moving the overview cameras into a better position. This camera was then added to our live stream, showing a bird's eye view of the docking station. While trying to launch the AUV, we encountered a problem with the right linear actuator that drives the thrust vector mechanism. We had to disassemble it and remove some resin that had accumulated on the lead screw - it is unclear if this was a result of low temperatures or improper casting during the original assembly. Since this process took some time (thanks to Michael for his patience with our limited workshop equipment!), we decided to have an early lunch and then launch the vehicle. After the AUV was launched and started with docking maneuvers, we also deployed the small ROV for external observation. After some tinkering, we managed to get the camera's video to work in the live stream as well, providing a third perspective on the environment. We spent the day working on docking, which now works fully autonomously – one of the main goals of this field test. In the last hour, we tested some more advanced docking methods that use the thrust vector method (more energy efficient, but also more complex), so far with limited success. In the evening we returned to the station in strong wind and cold temperatures.
24.3.22



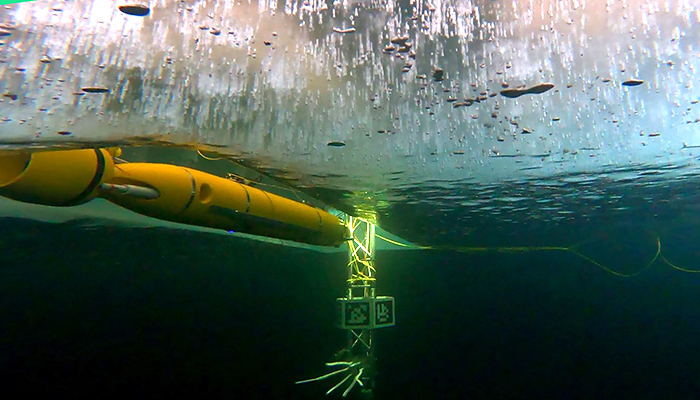
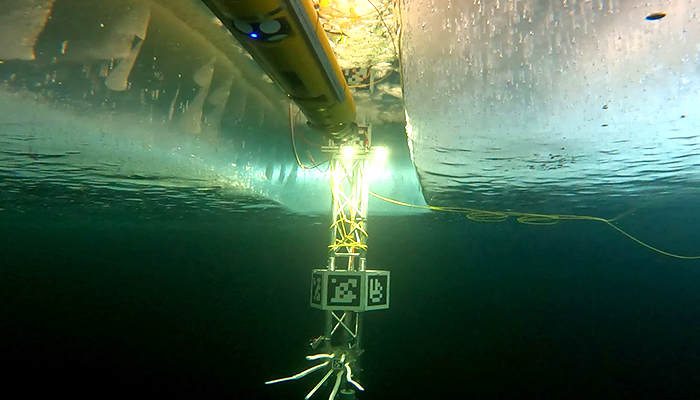
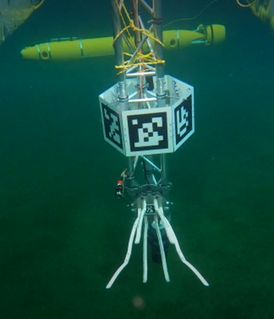
A sunny and calm day with 0°C welcomed us this morning. The transfer of the AUV, equipment and personnel down to the lake went quickly and we could already start our actual work at 9:30 am. While Felix (our occupational safety officer) built a ramp out of wood scraps to make it easier to get the AUV trailer onto the sled, the others assembled the docking station by first attaching lights and cameras and later attaching them to the base that had already been installed yesterday. This worked as planned, and we were able to continue preparing the AUV for its launch. After a short lunch break (which always takes about an hour and a half because we all have to go back to the station first, cook something and then come back), we deployed our BlueRov2, which will be used as a mobile camera for documentation purposes. It is planned to transmit its video stream to the live stream, which is not working yet, but hopefully will be figured out by tomorrow. The AUV launch went smoothly, this time with the fiber optic cable connected. The cable gives us a range of about 200 m around the hole while still being able to observe the robot and intervene in its mission, and it serves as a safety measure in case anything goes wrong, as it is strong enough to reel in the vehicle by pulling the cable – fortunately that was not necessary today. While the AUV was remotely controlled, it first had to measure the position of the various reference points on the docking station, since we had not yet completely set up the station in Bremen. Then we had to calibrate the depth controller, as it is not yet fully developed and still sensitive to changes in vehicle buoyancy. After this was completed, we started to test the docking behavior with different levels of autonomy until we finally docked successfully to the docking station at the end of the day. This is an important step in the mission, as the docking station will serve as a "home base" for the vehicle during long-term missions, where it can recharge and transmit data. Accordingly, testing this capability was a primary objective of this field test. After a very successful day, we returned to the station where a stately dinner of homemade pizza was prepared to celebrate the first day of experiments in Abisko.
23.3.22



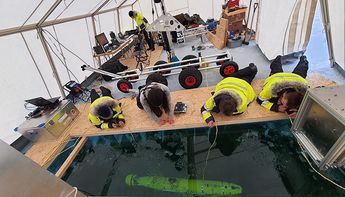



Cloudy with light rain, +4°C and some wind in the morning. After a quick breakfast we went down to the lake and found our tent in pristine condition, no signs of damage from last night's gusty wind. Nevertheless, we improved the anchoring with the help of the station staff and their experience. Inside, we began assembling the crane and setting up the workspaces. For the workspaces, we put a layer of insulating XPS foam on one side of the tent and covered it with OSB boards. This allowed us to place the tables and chairs on a dry, level floor that wasn't as cold. We connected the power cable (which the station staff had already laid near the ice hole) to our power relay and could start setting up the PC and infrastructure. One important item was the WIFI-link that would provide us with internet access (needed for both live streaming and internet lookup). The WIFI-link uses two parabolic antennas to connect to the research station. With this, we could finally start the live stream after a short lunch break. For now, only the overview camera was sending data, as the docking station still had to be assembled and the ROV was not yet deployed. After the lunch break, we also brought our AUV, safely on a sled (where it fit perfectly along with its trailer). On site, we used our crane to lift the AUV and its trailer off the sled. Over the next few hours, the docking station was assembled, and we got the AUV ready for its first dive with a simple pre-dive checklist. With the help of the crane, we were able to lift it into the water where we began buoyancy trimming: the vehicle must be as neutrally buoyant as possible to achieve the best performance. Although we had already trimmed the AUV for freshwater in the lab in Bremen, minor adjustments were still necessary as expected. Finally, we made a short first dive (remotely controlled) to get a feel for the environment. The water quality and visibility are extremely good, with the ground at 5 m distance easily visible from the ice hole. As it was getting late (and daylight was fading), we got the vehicle onto its trailer and then onto the sled to bring it back to the station for recharging and data transfer. With a happy (but tired) crew, we ended the day with some minor support tasks (recharging the AUV, extending a power cable for the docking station illumination) and looked forward to the first full day of trials tomorrow.
22.3.22








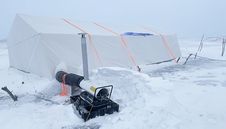
Overcast with +4°C, no wind on this second day of our field trials. The first order of business was a short trip to the lake to assess the condition of the ice – unfortunately with the result that the water layer is not yet frozen solid enough to work on. The research station staff had the idea of drilling drainage holes around our large ice hole to allow as much water as possible to drain away – this might give us a chance to get drier conditions around our hole. While they were on the lake drilling, we were busy transporting the material from our container to the lake, which is about 500 m away from the research station and only accessible by snowmobiles. We also wanted to charge DeepLeng's battery, which unfortunately did not work: the battery management system (BMS) refused to charge. After some investigation, it turned out that the low temperature shutoff was not deactivated (as planned), but set to 1°C – the battery was below that. Some time later, the communication protocol with the BMS was extended so that we could change the shutoff value to -10°C (the initial configuration of the BMS was done before installation in the oil-filled battery with a direct programming cable to the BMS, which was not possible to access today without disassembling half the vehicle).
During lunch, the staff told us that the draining of the water had been very successful and that we could start setting up on the lake in the afternoon. When we examined the conditions after lunch, we found that most of the water was gone and only a thin crust of ice remained, providing good working conditions. This meant that we spent the whole afternoon on the lake, first transporting a lot of equipment to the hole and then assembling a frame around the ice hole, which will increase safety around the hole and will be used to assemble the docking station and the crane. Second, we erected the tent (5x10m) and moved it above the ice hole. An important (and time-consuming) task after setup was securing the tent to the ice, as wind loads could be problematic due to the tent's exposed location on the lake. In the evening we left the lake after securing the tent and preparing everything for tomorrow's setup. Tomorrow morning, we will proceed with the crane and docking station and hopefully deploy the AUV for the first time. We will also finally have a chance to install the livestream equipment, so with a little luck, the livestream should be working by noon tomorrow!
21.3.22


Good weather with +5°C, sun and light wind welcomed us this morning. Before breakfast we went to the container to get out all the food. Due to the rain last Saturday, the whole ground is covered with a thin layer of ice, which makes every walk outside a very slippery matter. The research station staff remedied the situation somewhat during the day by spreading sand on our main paths (from the container to the lab and to our camp). After breakfast, the first thing on our list was to unpack the container, as the AUV is now safely in a garage where it can be charged and serviced. After turning on the vehicle, everything was fine, it's ready to go. Unfortunately, a first visit to the lake showed that the conditions there are anything but ideal. Rain has caused a 20 cm layer of water to form on the 90 cm thick ice, preventing us from setting up the tent and other equipment at the ice hole. Anything we would set up would permanently freeze to the ice over the next few days, making recovery impossible after our stay. So instead of setting up our camp on the lake, we began preparations and set up the infrastructure in our dining hall. Two of us drove back to Kiruna, 100 km away, to buy spikes for our shoes to improve traction and hopefully make our work on the ice tomorrow safer. We also deployed our small observation ROV through the ice hole (it doesn't require much support equipment) and were able to confirm a water depth of 5 m at the ice hole site and better visibility underwater. This also meant that two of us got our feet quite wet as we had not packed high waterproof boots (we did not expect to work standing in 20 cm of water, but on cold ice). We ended the day with a review of what had happened and a plan for tomorrow. According to the staff on site, the water should freeze over this night or the next, so we can start our camp on the ice tomorrow or Wednesday.
20.3.22





Today the Team traveled from Bremen (Germany) to Abisko (Sweden). On the picture the whole team can be seen before boarding our first flight – from left to right: Dr. Bilal Wehbe, Dr. Marc Hildebrandt, Marius Wirtz, Tom Creutz, Michael Zipper. Not visible on the picutre but also with us is Felix Bernhard who will be responsible for work safety on-site. On a sunny day we arrived at Kiruna airport at about 18:30 and continued travling by car to Abisko. On the way there we had an important stop: grocery shopping. While we already have basic food in our container, we need some perishables as well. During the stay at the research station we have to feed ourselves and the shopping possibilities in Abisko are limited.
Arriving at the research station, we checked into our rooms and took a look inside the container, which had arrived with no visible damage to its contents. At the end of the day we had something to eat and a small meeting to plan tomorrow – our first day on site!
18.3.22

The container with all our equipment arrived safely in Abisko, we are looking forward to opening it again – hoping that everything survived the 2400 km journey from Bremen.
17.3.22
Today, the staff at the Abisko Scientific Research Station drilled the hole in the ice of the lake where the AUV will be launched – many thanks to the technicians involved. The power supply is also installed and ready for use.



14.3.22 - Preperations
The first major milestone has been reached. Our AUV DeepLeng and all the equipment, a total of 2.3 tons of material, are on their way to northern Sweden. Our journey has now officially begun! The equipment and the AUV will be received at the destination Abisko Sweden by the very helpful team of the Abisko Scientific Research STATION. Our team will catch up over the weekend and arrive on Sunday evening. We are really looking forward to it!