Hannover Messe 2019
Mobile, Robust, and Adaptable – New Generation of Autonomous Space Robots
Space robots today are mostly passive observers and controlled by people back on Earth. Soon, however, they will be operating independently under extreme conditions for long periods. The DFKI Robotics Innovation Center develops innovative hardware and software concepts and tests them in a framework of analog missions here on Earth to ensure the demanding requirements on these systems can be met in space. Researchers are presenting their research findings at the DFKI stand (Hall 2, C59) at the Hannover Messe 2019.
In future space missions, robots will be asked to perform ever more complex tasks: on alien planets, they are to explore hard-to-reach areas such as caves and craters, build infrastructure for future base camps, perform orbital maintenance and repair work on satellites, or remove orbiting space debris. Earth-based remote control of the systems is impractical simply because of the communication delay to distant celestial objects. Future space robots must therefore be capable of independent actions.
Pioneering design: autonomy and multifunctional morphologies based on AI
The Robotics Innovation Center develops autonomous robotic systems that can fully perceive their surroundings for space applications using a variety of different sensors. To perform environmental detection, localization, and motion planning for the system, researchers in Bremen rely on artificial intelligence processes and algorithms, for example, machine learning methods. This results in robots that can decide and operate independently and, more importantly, learn from their own behavior. Only in this way, are deployments in the context of planetary and orbital missions over long periods and without human intervention possible.
Inspired by biology, scientists are developing innovative, highly complex mobility and morphology concepts for use on alien planets, specifically, for difficult terrain or terrain with some special scientific interest: these include multi-legged walking robots, hybrid systems that have leg-wheel designs, walking rovers with active drives, and upright and climbing systems in human-like forms. These reconfigurable systems have a modular design that can adapt flexibly to various conditions and tasking situations. These systems have the ability to perform challenging space missions, either alone or in robotic teams, or in combination with people.
Intuitive teleoperation systems and Human-Robot Collaboration (HRC)
Control over autonomous robots should also be possible remotely from Earth or the spacecraft. Human intervention may be necessary, especially, when tasks require a high degree of flexibility. Researchers at DFKI are developing innovative teleoperation systems that are known for intuitive operation. Such systems can be remotely controlled, for example, from a control station using a portable exoskeleton that enables a force feedback circuit. The human operator has the feeling of being part of the action and can sense when the system encounters an obstacle.
In the near future, robots and astronauts will work together in space, for example, in constructing infrastructure. The DFKI research lab tests various grades of autonomy: the robot acts more or less autonomously depending on the complexity of the tasking. The astronaut intervenes by teaching a new behavior if the robot gets stuck. To achieve successful HRC, scientists study the latest methods of intention recognition and analysis, which includes taking physiological data into account, for example, by integrating the operator's emotions and state of mind in the planning or optimization of the robot action.
Out of the lab: Test for autonomous space robots
New systems are tested in so-called analog missions under realistic conditions outside the lab to ensure they will work as planned in the harsh environments of Mars or the Moon. Scientists from DFKI and the University of Bremen traveled to the Mars-like desert of the state of Utah in the American west at the end of 2016, to simulate a complete mission sequence and test the capabilities of the rovers SherpaTT and Coyote III. The purpose of the mission was to use a heterogeneous robot team to build a logistical chain that supports the autonomous exploration of the environment and taking of soil samples. Scientists used a mission control station located in Bremen, where a communication link was established via satellite to the robots in Utah. The operator was able to intuitively control the system at a distance of more than 8,300 km by means of the exoskeleton system.
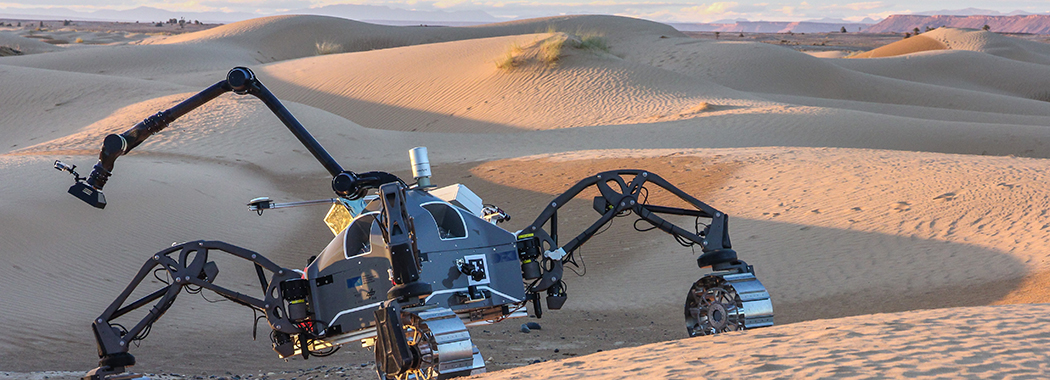
In November 2017, DFKI researchers traveled to Tenerife (Canary Islands) for two-weeks of field testing of newly developed algorithms. The algorithms made it possible for the CREX and Asguard IV robots to explore the lava caves on the island of most interest to space exploration. More recently – from November to December 2018 – the researchers went to the Moroccan desert to test software developed together with European partners for use in space. They used SherpaTT, the DFKI hybrid walking and driving rover, as the robotic test platform. Thanks to the new software, it traversed a distance of more than 1.3 km through a landscape characterized by wide plains as well as steep slopes and deep ravines.
Technology transfer: Space technologies for hostile environments on Earth
Robotic systems in space have a tremendous transfer potential: These systems are designed for use in rough terrain and are well-suited for use in extreme and hostile surroundings on Earth. For example, they can be deployed in deep undersea or contaminated areas. The robotic specifications to provide the necessary autonomy and manageability are very similar in such places, especially, in terms of their mobility, adaptability, and sturdiness. Bremen scientists have succeeded in further developing the SherpaTT robot for deployment in a deep sea scenario: it can also be used now as an autonomous underwater rover for sustainable resource extraction or for monitoring and inspection of deep-sea facilities. Also, they have equipped the micro-rover Coyote III with a gas sensor, which allows it, independently and without endangering human life, for example, to explore a hard-to-access building and detect any gas leaks after a disaster event.
Contact
Prof. Dr. Frank Kirchner
Head of DFKI Robotics Innovation Center
Frank.Kirchner@dfki.de
Phone: +49 421 178 45 4100