The removal and prevention of space debris in earth orbit is a task with increasing importance. Only by solving this problem, the security of manned missions and orbital installations can be guaranteed in the future. Related to removing and preventing space debris are activities to increase the lifetime of satellite systems through maintenance, which prevents that those systems become space debris themselves.
Both for the removal of space debris and for the maintenance of satellites a semi-autonomous approach and capturing of the "Client" by a "Servicer" system is necessary. While the previous project INVERITAS focused on the development of base technologies for those tasks, the current project RTES-TA focuses on the development and adaptation of these technologies for a later commercial implementation.
The project partner and project leader Astrium conducts an assessment and feasibility analysis of robotic technologies in RTES-TA that would be necessary to remove large space debris parts in a commercial context.
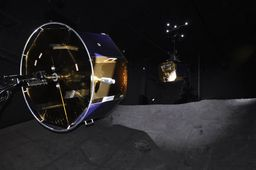
At the DFKI the demonstration and verification technologies are focused which are necessary for realistic ground-based testing of the technologies targeted by Astrium. To verify the new developments in this area, HIL simulators are a very suitable solution, since the actual hardware to be used can be tested inside the simulator. This makes it possible to test both the physical sensors and the real data processing hardware under realistic conditions. Conditions that cannot easily be reproduced on earth are simulated in software such as the orbital dynamics of the simulated objects (e.g. space debris, satellites).
The INVERITAS facility of the DFKI is a HIL simulation system suitable for such a realistic ground-based testing. Based on the current state of this system, which was developed at the DFKI in the INVERITAS project, necessary modifications, enhancements and developments are to be identified and partially implemented. The goals include increaseing the flexibility, the range of possible simulation scenarios and the accuracy of INVERITAS HIL simulation system.
Partners
Astrium