![[Translate to English:]](/fileadmin/user_upload/DFKI_SAIROL_Jan-Peters_Artikel-header_1050x400px.jpg "[Translate to English:] DFKI/Jürgen Mai")
You have been a professor at TU Darmstadt for some time and are now also head of research at DFKI. What is the focus of your research and what fascinates you and your team the most?
Technically speaking, in the Research Department "Systems AI for Robot Learning – SAIRLOL", the focus is primarily on basic research into Machine Learning for intelligent autonomous robot systems. In other words, the development of methods and corresponding architectures for such systems. But also their application in Cognitive Science, with biologically and neuronally inspired approaches to Artificial Intelligence, for example interaction via brain-robot interfaces or for robot-assisted rehabilitation and prosthetics. We are particularly fascinated by the playful aspects of learning robots, from which many lessons can be learned. For example, we are currently trying to teach robots to play air field hockey. Before that, we worked on table tennis for almost ten years.
Why table tennis and air field hockey?
We wanted to show that a robot learning system can learn such a game from a human – and do it better and faster than a classically programmed robot. That's why we started with table tennis. Because until now, no one has been able to build or program a table tennis robot that is comparable to a human. We have managed to do that. But there are other hurdles in table tennis. The intelligence aspect is now fading into the background. A much bigger challenge is the great mechanics of humans. Muscles can quickly produce high accelerations that robots generally find difficult – even if robots are more accurate and faster. While we have succeeded in developing a robot with human-like accelerations, this already brings us to the next difficulty: humans can move one step to the side and perform the same stroke again there. In the case of a robot, this means that it would have to be placed on a mobile base. This requires enormously complex hardware and is therefore difficult to implement. A stationary robot arm is therefore not only limited in its mobility, but also has to learn many different strokes in its position. Nevertheless, table tennis is a comparatively regular situation. When played according to the rules, for example, the ball must come up in play on the opponent's side of the table tennis.
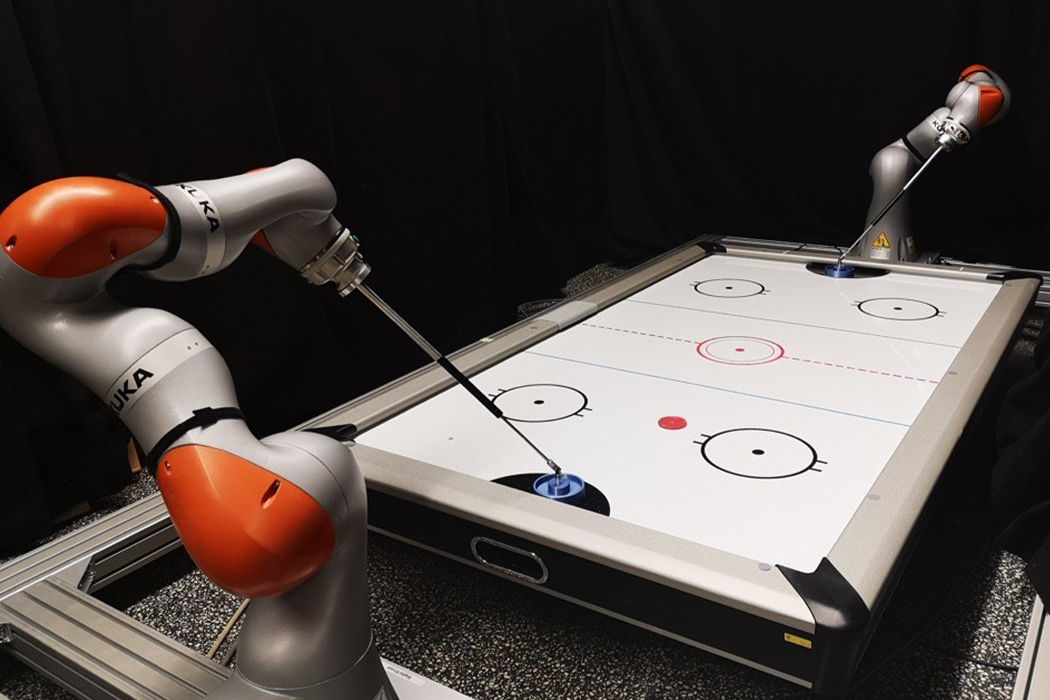
In air field hockey the situation is incomparably more exciting. Unlike table tennis, it is downright chaotic. For example, if the puck is hit in a minimally different way, it can go to a completely different spot and a whole new response to the shot must be found. Humans are also good at tricking in air field hockey, for example by hinting at wrong stroke directions as feints. The robot has to react to this as well. In our research prototype, we have two robotic arms playing against each other and use other robots to assist, for example to re-throw the puck. We are looking at all levels of what kind of intelligence is needed for the game. On the one hand, it requires motor intelligence. Furthermore, it requires perceptual, perception-based input and more long-term strategy. One needs to predictively mesh the robot and build models about the opponent. In this way, it can be intelligently tricked and a more exciting gameplay occurs. These are different cognitive levels to be on, and we can draw a lot of insights from this about how they interact, as well as between neural and symbolic AI.
"A huge potential exists in industrial robotics if we no longer had to adapt the environment to the robot."
What potential do you see for learning robots in the future? How can the field develop further?
At the moment, robot application is based on us manually adapting the environment to the robots. Industrial robot environments have been developed in such a way that hardly any sensor needs to be used. The machines travel the same trajectories with 150 micrometer accuracy. If a human enters the workspace, it can be life-threatening for them. That's why robots are often in cages there, and great care is taken to keep people away from them. But in industrial robotics, there is huge potential if we no longer had to adapt the environment to the robot. A former CEO of the mechanical engineering company Kuka once put it succinctly: "The robots of today perform the same movement millions of times. The robots of the future will have to perform thousands of different movements just a few times." This will probably make up the customer-centric products of the future, but it is not feasible with classic robot programming. To get it right, robotics will have to change fundamentally: No longer should the environment be adapted to the robot, but the robot should learn to adapt to tasks and the environment. This is precisely what the field of "robot learning" is concerned with.
The potential of adaptive robots is probably not limited to industrial applications, is it?
In fact, it goes beyond that. For example, pick-up and drop-off tasks in clinics could be taken over by robots. That would give nurses more time to provide care. No job would be endangered by this – on the contrary. It would make work easier and more pleasant for many. One can also take a look at rehabilitation. This area should be supported by adaptive devices. Comparable to the systematics in air field hockey, where it is a matter of creating models about the opponent, here one can build models about the patient in order to support him appropriately in his movements. We have already developed an example of this with the Tübingen Clinic and the Max Planck Institute for Intelligent Systems. We were able to show that the combination of brain and computer works via corresponding brain interfaces with a robot arm and robot learning. This makes it possible to provide motor support in rehabilitation.
"The robot vacuum cleaner has already proven that robots will enter millions of homes if they are affordable."
Can you give a preview of what the household robot will look like in the near future?
The idea of the robot helping in the household is very old. We already know it from TV series of the 1950s and 1960s. One important factor has changed enormously since then. When I was finishing my doctorate, a household robot would have cost up to half a million euros. You could buy the arms for 120,000 euros each. Nowadays, you can buy them for a tenth of that price. If you were to buy the parts today, you would be looking at a total of about 20,000 euros. So the costs have dropped enormously. If this continues, the household robot will gradually become affordable. The vacuum cleaner robot has already proven that robots can find their way into millions of households if they are affordable enough.
So is the fully functional household robot already available for 20,000 euros, or is it still down to certain technical capabilities?
Technically, it is feasible to develop the household robot for a certain type of home. However, the market is far too small. Moreover, not every house would be suitable for it. But for the typical country kitchens and living rooms, it would not be problematic at the moment. Moreover, it is an iterative process. Unlike autonomous driving, such a system can afford to make a certain amount of mistakes without risking human lives. Thus, the obstacles are smaller.
Is it justified to be worried about such robots taking on a life of their own?
I wouldn't worry about that. The highly specialized systems for specific tasks still lack general intelligence. I see more problems with simple software systems where no thought has been given to which human rules have been mapped in the software. In artificial intelligence, our models are fed with lots of data and lots of validation. When I see how inexpensive programs have been installed that banks have been working with for decades, it causes me greater concern. For example, one of the biggest stock market crashes of the 1980s in the U.S. can be traced back to it. Simple "If/Then" rules about buying and selling were stored in banks' computers at the time. As long as the stock market did not move outside the normal distribution, things went well so far. But a normal distribution is a bad model for social and financial processes, because they usually have so-called 'heavy tails'. These are very, very unlikely events that can nevertheless occur. There was a lot of fluctuation at the time, so all the 'If/Then' rules came on like a tree of lights. In the end, they literally pulled the plug out of the computer to prevent a collapse of the American economy.
Today, in a variety of forms, that can happen to us again any day, and it's becoming more likely because of rapid technological developments. Whether in new energy networks, industrial manufacturing or home automation. In comparison, the danger of a "terminator" is completely negligible.
"When all the people from the AI industry are running in one direction, it is the right time to take a different path."
What advice do you give to young people who want to work in the field of artificial intelligence?
An elementary requirement is to build a broad foundation in AI. When all the people from the AI industry are running in one direction, it is the right time to go another way. Right now, Deep Neural Networks are the most popular AI topic. This approach was brought back to life for the third time after 20 years of being dead. This approach had been thought to have failed for methodological reasons. In the meantime, it turned out that there was a lack of computing time and that the data sets were too small. When Deep Neural Networks re-emerged, there was initially a lot of skepticism in the air. This dissipated when Deep Learning was able to show great success in computer vision and Natural Language Processing. Accordingly, Deep Learning is an important pillar for Artificial Intelligence. But the same approach alone will not work in Robot Learning or even Machine Learning for real-world technical systems. A physical system produces its data in real time and will never have enough of it. It also responds in real time with limited computing power. So fundamentally different insights are needed here.
My advice is therefore to acquire as deep and broad a foundation in AI as possible. After that, take a look at the AI landscape and orient yourself independently. While you should be close enough to the current topics, you should not follow the "mainstream", otherwise you will always be the laggard and imitator. By focusing on AI fundamentals, it is possible to anticipate problems that no one has looked at before in this form. This only happens when one cannot download all the data from the Internet or the algorithms and frameworks are provided by Google and Facebook. One should put independent performance in the foreground. That's the beauty of systemic AI in Robot Learning. There, we have a lot of such unfolding opportunities.
The interview was conducted by Franziska Peters, DFKI Corporate Communications.
![[Translate to English:]](/fileadmin/user_upload/DFKI_SAIROL_Air_Hockey.jpg "[Translate to English:]")
![[Translate to English:]](/fileadmin/user_upload/DFKI_SAIROL_UK_JPeters-FPeters.jpg "[Translate to English:]")