In einem Ozean, der von einer bis zu 15 Kilometer dicken Eisschicht bedeckt ist und sich zudem auf dem Jupitermond Europa in einer Entfernung von durchschnittlich 600 Millionen Kilometern befindet, könnte es zu finden sein: Das extraterrestrische Leben. Die hydrothermalen Quellen, die auf dem Eismond vermutet werden, bieten durch das Spenden von Wärme und Mineralien einen potentiellen Lebensraum für Organismen. Doch wie ließe sich dieser Ort erforschen? Als Teil der Explorer-Initiativen des Deutschen Zentrums für Luft- und Raumfahrt hat das Robotics Innovation Center in Bremen vollautonome Unterwasserroboter entwickelt, die unter einer Eisdecke eigenständig navigieren und forschen können.
Mit dem dritten Abschnitt des Projektes Europa Explorer zur Langzeit-Untereis-Navigation (EurEx-LUNa) werden nun seit dem 1. März 2020 die letzten Schritte unternommen, um das neueste autonome Unterwasserfahrzeug (AUV) im Feldtest auf die Probe zu stellen: In einem zugefrorenen See in Skandinavien soll DeepLeng, der Nachfolger des ersten EurEx-AUV Leng, die Machbarkeit des Konzepts zur autonomen Navigation unter Eis beweisen. Hierzu wird der Roboter mit einer neuen Tauchzelle ausgestattet und auf eine sichere Rückkehr trainiert.
Sicheres Docking und ein geringes Verlustrisiko im Feldtest
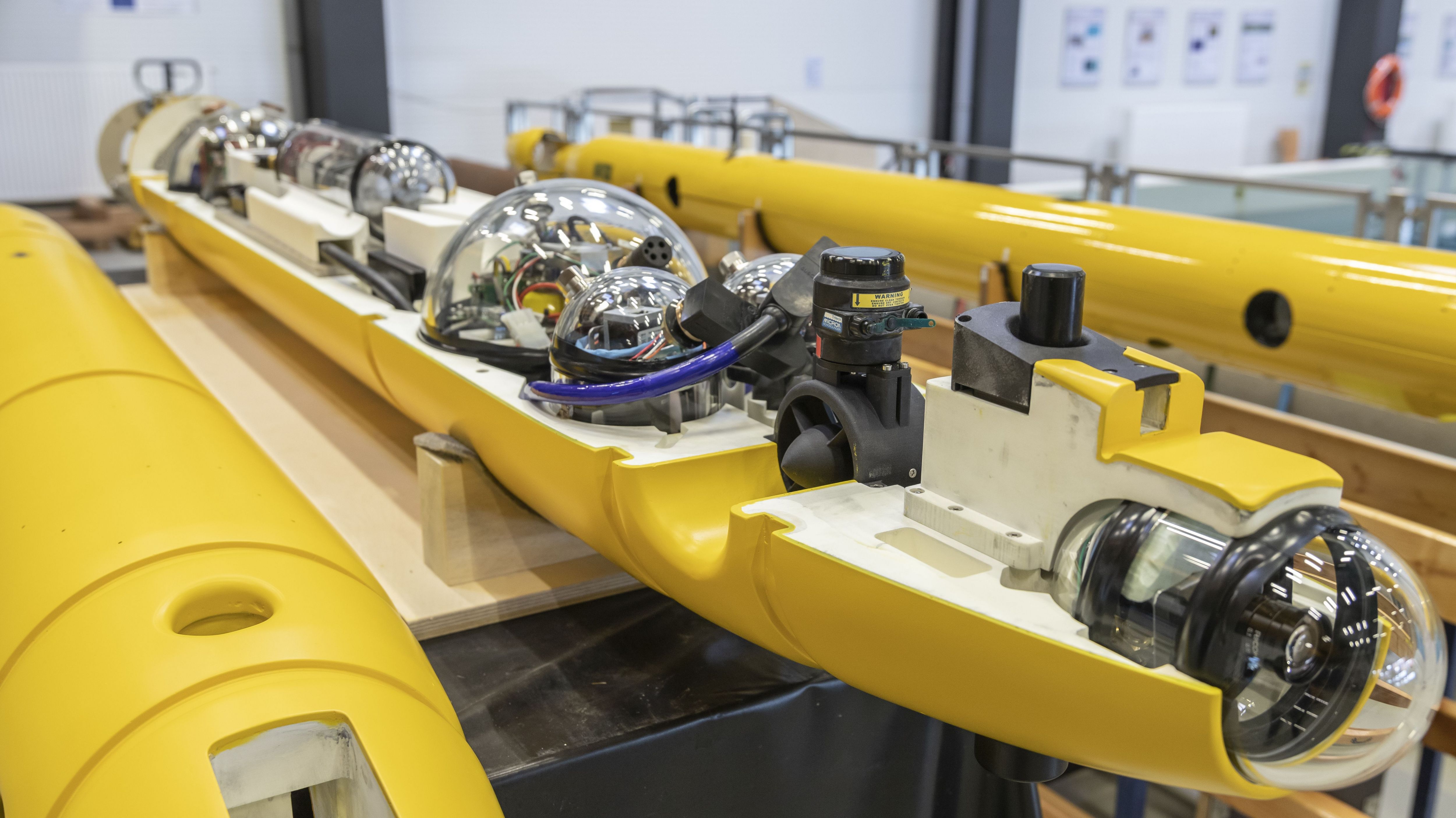
Im Zentrum des Projekt EurEx-LUNa steht die Risikominimierung: Neben den unbekannten Gegebenheiten unter Wasser stellt die Eisdecke eine weitere Herausforderung für die Ortung und die sichere Rückkehr des AUV dar. Deshalb wird DeepLeng darauf trainiert, auch unter widrigsten Umständen seinen Weg zu finden. Auf Softwareebene arbeiten die Forschenden am DFKI Robotics Innovation Center deshalb an einem Fehlerbaum, der für möglichst viele Szenarien eine alternative Entscheidung parat hat, die DeepLeng autonom treffen kann. Zusätzlich zur neuen Tauchzelle, die das AUV in potentielle Tiefen von bis zu 2.000 Meter energiesparend auf- und absinken lässt, wird ein USBL-Unterwassernavigationssystem verbaut, das akustische Signale senden, empfangen und verarbeiten kann.
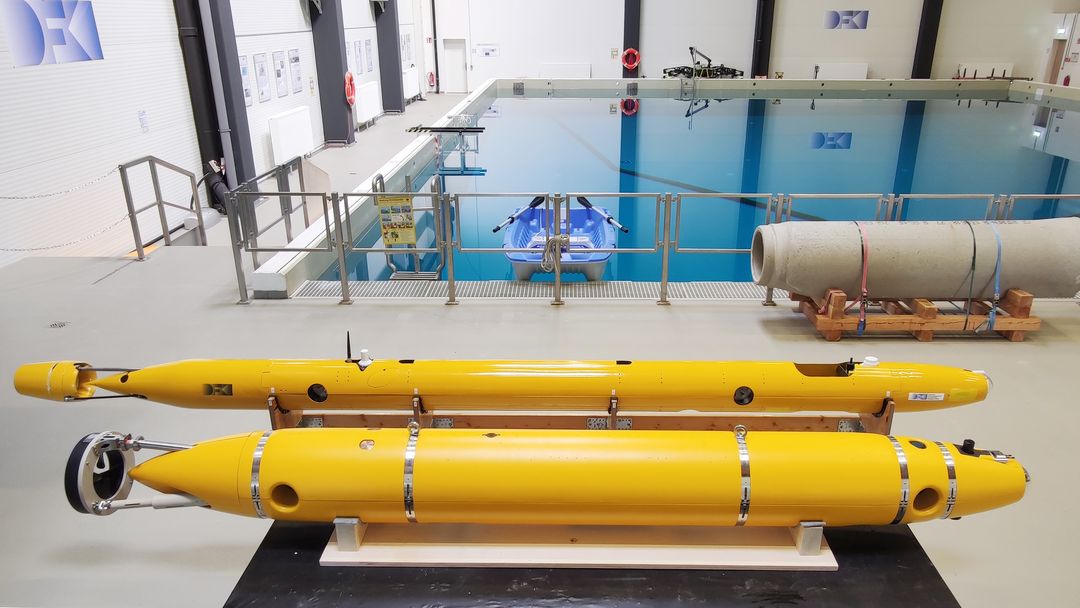
Wichtig ist den Wissenschaftlerinnen und Wissenschaftlern des DFKI das erfolgreiche Docking: Als Teil des Navigationskonzepts auf dem Eismond Europa ist vorgesehen, dass der drei Meter lange und 28 Zentimeter breite DeepLeng während der Mission eigenständig eine Dockingstation erreichen und sicher andocken kann. Hierdurch kann das AUV deutlich längere Forschungsmissionen verfolgen, als es seine zehn Stunden Akkulaufzeit erlauben würden. Durch den Platz für zwei weitere Nutzlast-Module kann DeepLeng weitere Sensorik transportieren und einsetzen, die vielfältige und ergänzende Forschungen im Ozean des Eismondes ermöglichen. Möglich sind beispielsweise die Erstellung von Höhenkarten oder Profilen der Temperatur und des Salzgehalts.
Vom Testbecken über den Stadtwaldsee nach Skandinavien
Um das sichere Docking zu ermöglichen, setzen die Forschenden Methoden des Deep Reinforced Learning ein, mit denen die Software des 120 Kilo schweren AUV zunächst in der Simulation trainiert wird. Die ersten Tests im Wasser werden in der europaweit einzigartigen Maritimen Explorationshalle des Robotics Innovation Center durchgeführt, die mit ihrem 3,4 Millionen Liter Salzwasserbecken ausreichend Platz bietet. Im zweiten Schritt ist eine Erkundung des Bremer Stadtwaldsees vorgesehen, bevor die eigentlichen Feldtests in Skandinavien im Frühjahr 2022 ansteht. Auch ein Einsatz im neuen Testfeld des Testzentrums für Maritime Technologien, dass das DFKI gemeinsam mit dem Fraunhofer-Institut für Fertigungstechnik und Angewandte Materialforschung (IFAM), dem Helmholtz-Zentrum Geesthacht – Zentrum für Material- und Küstenforschung (HZG), dem Institut für Chemie und Biologie des Meeres der Universität Oldenburg und der Jacobs University Bremen betreibt, wird für die Vorbereitung auf den Feldtest in Betracht gezogen.
Im Anschluss an die Feldtests werden die erhobenen Informationen und die Erkenntnisse aus der Navigation evaluiert, um zukünftig in weiteren Projekten eingesetzt zu werden und dazu zu dienen, in einigen Jahren tatsächlich den Jupitermond Europa durch autonome Roboterteams auf extraterrestrisches Leben zu untersuchen. Hierzu fördert das Bundesministerium für Wirtschaft und Energie (BMWi) das Projekt EurEx-LUNa mit rund 877.000 Euro über eine Laufzeit von zwei Jahren und drei Monaten.
Bildmaterial
Unter cloud.dfki.de/owncloud/index.php/s/YSBkFrJgdxZqTZm steht Ihnen Bildmaterial zum Download bereit. Dieses können Sie mit Nennung der hinterlegten Quelle gerne verwenden.
DFKI-Kontakt
Dipl.-Inf. Sascha Arnold
Deutsches Forschungszentrum für Künstliche Intelligenz GmbH (DFKI)
Robotics Innovation Center
E-Mail: Sascha.Arnold@dfki.de
Tel.: 0421 17845 4197
DFKI-Pressekontakt
Deutsches Forschungszentrum für Künstliche Intelligenz GmbH (DFKI)
Team Unternehmenskommunikation Bremen
E-Mail: uk-hb@dfki.de
Tel.: 0421 178 45 4180