Bislang werden Unterwasserschweißungen wie Reparaturen von Hafenanlagen, Offshore-Strukturen und anderen metallischen Bauwerken von Hand durchgeführt. Der Bedarf übersteigt die verfügbaren Fachkräfte jedoch deutlich. Hier setzte das vom Bundesministerium für Wirtschaft und Energie (BMWE) geförderte Projekt MARIOW (Maritime AI-Guided & Remote Operated Welding) an: Erstmalig haben die Partner ein robotisches System entwickelt, das Unterwasserschweißarbeiten weitgehend autonom ausführen kann. Es soll Taucher:innen künftig bei körperlich belastenden und risikoreichen Tätigkeiten entlasten und gleichzeitig präzisere, gleichmäßigere Schweißnähte selbst unter schwierigen Sichtbedingungen anfertigen.
Zum Projektkonsortium gehörten neben dem DFKI Robotics Innovation Center in Bremen das Institut für Material- und Prozesstechnik sowie das Labor für Autonome Systeme der TH Köln, das Fraunhofer-Institut für Graphische Datenverarbeitung IGD, die AMT GmbH und die Unterwasserkrause – Mutzeck GmbH.
Modularer Unterwassermanipulator
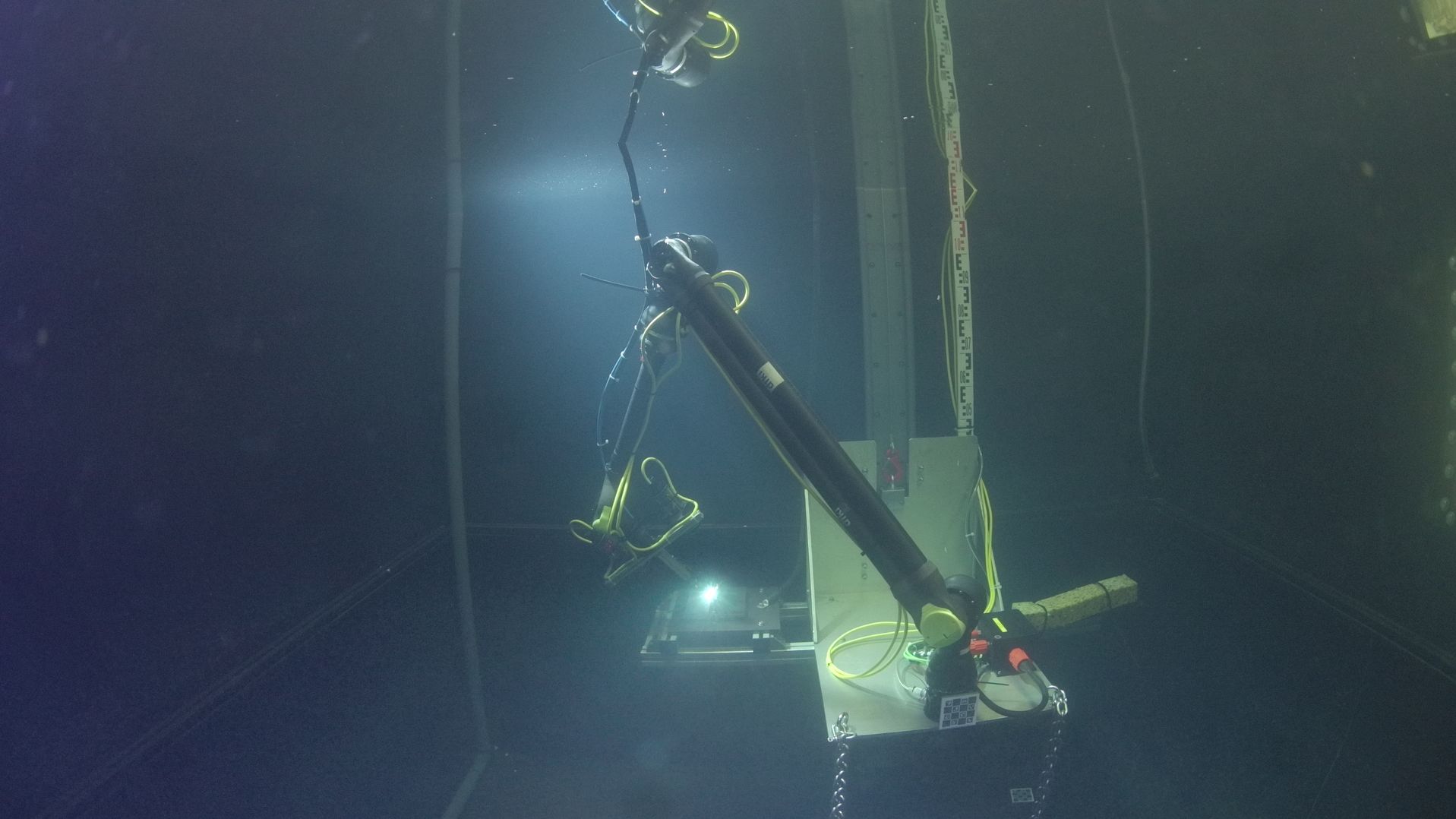
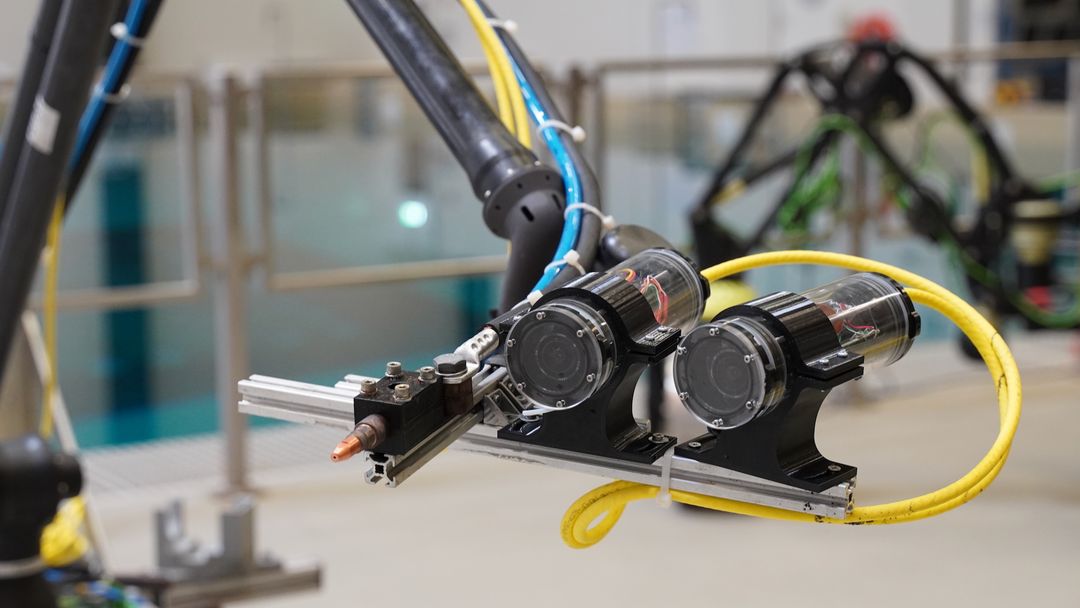
Zentrales Element des Systems ist ein am DFKI entwickelter modularer Unterwassermanipulator. Der Roboterarm ist bis zu einer Tiefe von 6.000 Metern einsetzbar, verfügt über eine Reichweite von zwei Metern und ist an unterschiedliche Einsatzszenarien flexibel anpassbar. Durch eine Kombination aus dezentraler Gelenkregelung und übergeordneter Bewegungsplanung führt der Manipulator die Schweißarbeiten präzise und wiederholgenau durch.
KI-gestützte Bestimmung der Schweißbahn
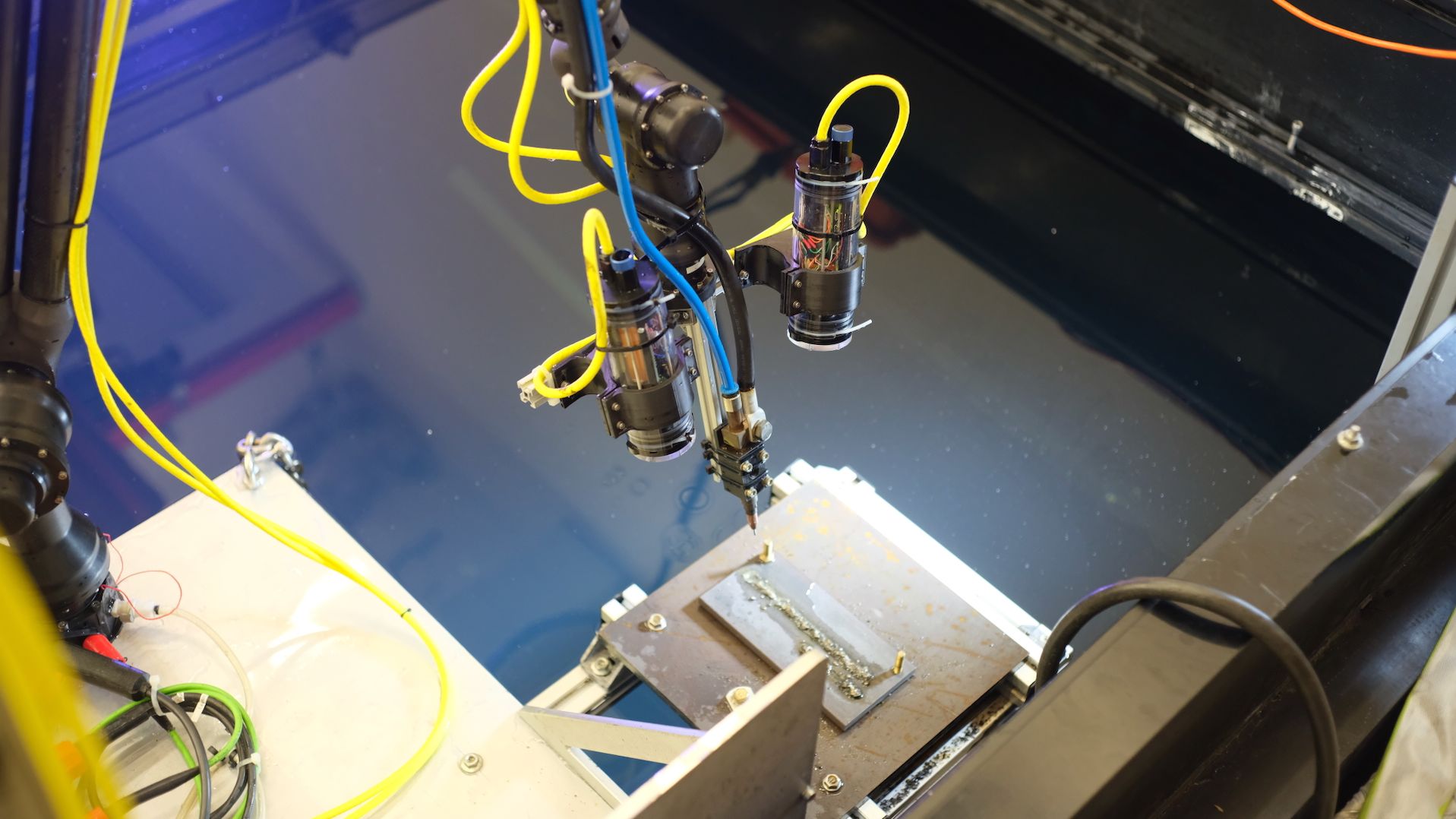
Ein weiteres Kernstück des MARIOW-Systems ist die KI-gestützte Bestimmung der Schweißbahn. Das vom Fraunhofer IGD entwickelte Stereo-Kamerasystem liefert hochauflösende Unterwasseraufnahmen direkt am Schweißbrenner. Darauf aufbauend hat das Labor für Autonome Systeme der TH Köln KI-Modelle entwickelt und trainiert, die Schweißstöße sowie deren Start- und Endpunkte autonom erkennen. Die KI berechnet anschließend die optimale Bewegung des Roboters.
Neuartiges Fülldraht-Schweißverfahren
Ein entscheidender technologischer Fortschritt ist das Fülldraht-Schweißverfahren, das Unterwasserschweißungen erstmals zuverlässig automatisierbar macht. Der vom Institut für Material- und Prozesstechnik der TH Köln gemeinsam mit der AMT GmbH entwickelte underwater flux-cored arc welding (UW-FCAW)-Prozess ersetzt die herkömmlichen Stabelektroden, die bereits nach wenigen Zentimetern Schweißnaht ausgewechselt werden müssen, durch einen kontinuierlichen Draht. Dieser ununterbrochene Materialfluss bildet die Grundlage für stabile, kontrollierte und reproduzierbare Nähte.
Erfolgreiche Abschlussdemonstration
In der finalen Projektphase wurden alle Teiltechnologien im Unterwasser-Testbecken des DFKI in Bremen zusammengeführt und praxisnah demonstriert. Dabei wurde die vollständige KI-basierte Bestimmung der Schweißlinie, die automatisierte Planung des Schweißpfads und die abschließende Schweißung mittels UW-FCAW-Verfahrens umgesetzt. „Wir konnten erfolgreich zeigen, dass das automatisierte Fülldrahtschweißen unter Wasser realisierbar ist. Damit haben wir die Grundlage für eine weltweit neuartige Technologie geschaffen, die großes Potenzial für die maritime Wirtschaft und den Industriestandort Deutschland birgt“, sagt Christian Koch, Projektleiter am DFKI Robotics Innovation Center.
In kommenden Vorhaben möchte das Konsortium diese Ergebnisse weiter ausbauen. Neben der Verbesserung der Qualität der Schweißnaht steht dann vor allem der Praxiseinsatz im Hafenbecken auf dem Programm. Der Einfluss von Salzwasser, Strömung und Wellengang wird dann eine Anpassung der bestehenden Systeme nötig machen. Zudem steigt durch den höheren Druck in der Tiefe die Anforderung an Komponenten etwa in Bezug auf die Dichtigkeit. Nicht zuletzt soll ein Lasersystem integriert werden, das die Schlacke entfernt, die während des Schweißens entsteht.